
Tắt dần
- Cổng thông tin Vật lý
- Thể loại
Trong các hệ vật lý, sự tắt dần là sự hao hụt năng lượng của hệ dao động do hiện tượng tiêu tán.[1][2] Sự tắt dần có thể đến từ bên trong hoặc bên ngoài hệ, và có xu hướng làm suy giảm hoặc cản trở sự dao động của hệ[3] Một số ví dụ về sự tắt dần gồm có sự tắt dần do nhớt trong một chất lỏng (xem lực cản nhớt), ma sát tiếp xúc, bức xạ,[1] điện trở trong các hệ dao động điện tử, và sự hấp thụ và tán xạ ánh sáng trong các hệ dao động quang học. Sự tắt dần không dựa trên tiêu hao năng lượng đóng vai trò quan trọng trong hệ dao động khác chẳng hạn như trong các hệ sinh thái và xe đạp[4] (ví dụ: Hệ thống treo). Khác với sự tắt dần, ma sát chỉ là một loại lực tiêu tán tác động lên hệ vật lý. Ma sát có thể là nguyên nhân hoặc là một yếu tố góp phần gây ra sự tắt dần.
Hệ số tắt dần là một đại lượng không thứ nguyên đặc trưng cho sự suy giảm trong dao động của hệ sau khi nhận tác động. Có nhiều hệ thể hiện sự dao động sau khi bị yếu tố tác động đưa ra khỏi điểm cân bằng tĩnh. Ví dụ, một hệ bao gồm vật nặng và lò xo khi bị kéo xuống và thả ra sẽ sinh ra dao động lên và xuống. Trong mỗi chu kỳ dao động, hệ có xu hướng quay trở về điểm cân bằng ban đầu, nhưng sẽ bị vọt lố do quán tính. Sự hao tổn năng lượng, chẳng hạn do ma sát, có thể khiến hệ tắt dần và làm cho biên độ dao động suy giảm hoặc về không. Hệ số tắt dần là thước đo thể hiện tốc độ suy giảm biên độ dao động giữa các chu kỳ liên tiếp.
Hệ số tắt dần là một tham số của hệ, được kí hiệu là ζ ("zeta") và có thể mang giá trị từ không tắt dần (ζ = 0), tắt dần dưới ngưỡng (ζ < 1), tắt dần tới hạn (ζ = 1) tới tắt dần quá ngưỡng (ζ > 1).
Trạng thái của hệ dao động thường được quan tâm trong nhiều lĩnh vực nghiên cứu bao gồm kỹ thuật điều khiển, kỹ thuật hóa học, kỹ thuật cơ khí, kỹ thuật kết cấu công trình và kỹ thuật điện. Các đại lượng vật lý xuất hiện dao động khá đa dạng, chẳng hạn như sự đung đưa của một tòa nhà cao tầng do gió, hay tốc độ của một động cơ điện. Tuy nhiên, phương pháp chuẩn hóa số liệu, hay phương pháp không thứ nguyên, có thể được sử dụng để mô tả một cách thuận tiện đặc điểm chung về trạng thái của các đại lượng trên.
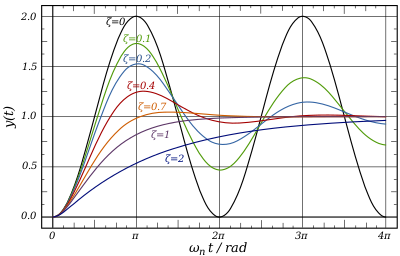
Tùy thuộc vào mức độ tắt dần, một hệ có thể có trạng thái và tốc độ dao động khác nhau.
- Khi hệ vật năng - lò xo không có sự tiêu tán năng lượng, vật nặng sẽ dao động vô thời hạn, với mỗi chu kỳ dao động giống với chu kì trước. Trường hợp giả định này được gọi là dao động không tắt dần.
- Khi hệ có sự tiêu tán cao về mặt năng lượng, ví dụ nếu hệ vật nặng - lò xo được đặt trong một chất nhớt, vật nặng có thể chuyện động chậm dần về phía vị trí cân bằng mà không hề có sự vọt lố. Trường hợp này được gọi là dao động tắt dần quá ngưỡng.
- Thông thường, vật nặng có xu hướng vọt lố khỏi vị trí ban đầu, sau đó chuyển động ngược trở lại, và lại tiếp tục vọt lố. Sau mỗi chu kỳ dao động, năng lượng của hệ bị tiêu tán, và biên độ dao động suy giảm gần về không. Trường hợp này được gọi là dao động tắt dần dưới ngưỡng.
- Giữa trường hợp tắt dần dưới ngưỡng và tắt dần quá ngưỡng, tồn tại một ngưỡng tắt dần mà khi đó hệ thống chỉ vừa hết vọt lố và không còn tạo ra dao động nào. Trường hợp này được gọi là dao động tắt dần tới hạn. Sự khác biệt mấu chốt giữa dao động tắt dần quá ngưỡng và dao động tắt dần tới hạn là, trong trường hợp tới hạn, hệ thống trở về trạng thái cân bằng trong thời gian ngắn nhất.[5]
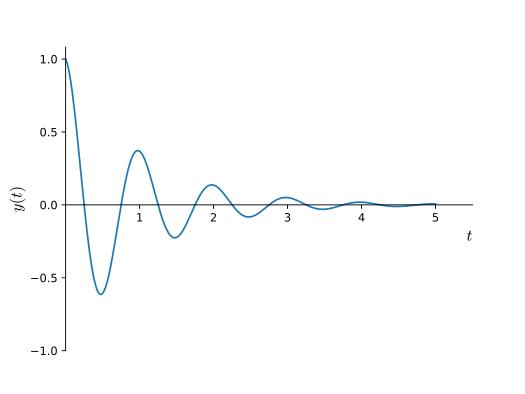
Sóng sin tắt dần là hàm hình sin với biên độ giảm dần về không theo thời gian. Nó tương ứng với trường hợp tắt dần dưới ngưỡng của một hệ dao động bậc hai, hay phương trình vi phân bậc hai của dao động tắt dần dưới ngưỡng.[6] Sóng sin tắt dần thường xuất hiện trong khoa học và kỹ thuật bất cứ khi nào có một dao động điều hòa tiêu hao năng lượng nhanh hơn so với nguồn cung cấp. Một hàm sin thực sự bắt đầu với giá trị bằng không khi thời gian bằng không. Trong khi đó hàm cosin lại bắt đầu với giá trị tối đa do sự khác biệt về pha so với hàm sin. Một sóng hình sin với cả hai thành phần sin và cosin có thể mang giá trị pha ở giữa so với hai sóng trên. Thuật ngữ "sóng sin tắt dần" bao gồm tất cả các sóng tắt dần như trên, bất kể giá trị pha ban đầu là bao nhiêu.
Hình thức tắt dần phổ biến nhất thường được sử dụng trong giả định là hình thức xuất hiện trong các hệ tuyến tính. Đây là hình thức tắt dần theo hàm mũ, theo đó hình bao các đỉnh của dao động là một đường cong suy giảm theo hàm mũ. Nói cách khác, khi ta nối các điểm cực đại trên mỗi đoạn cong của đồ thị thì sẽ thu được một đường cong giống với hàm mũ suy giảm. Phương trình tổng quát cho một sóng sin tắt dần có thể được trình bày như sau y ( t ) = A e − λ t cos ( ω t − φ ) {displaystyle y(t)=Ae^{-lambda t}cos(omega t-varphi )} với:
- y ( t ) {displaystyle y(t)}
 là biên độ tức thời tại thời gian t;
là biên độ tức thời tại thời gian t; - A {displaystyle A}
 là biên độ ban đầu của hình bao;
là biên độ ban đầu của hình bao; - λ {displaystyle lambda }
 là hệ số suy giảm, mang đơn vị nghịch đảo của biến thời gian t;
là hệ số suy giảm, mang đơn vị nghịch đảo của biến thời gian t; - φ {displaystyle varphi } là góc pha tại t = 0;
- ω {displaystyle omega } là tần số góc.
Các tham số quan trọng khác bao gồm:
- Tần số f = ω / ( 2 π ) {displaystyle f=omega /(2pi )} là số chu kỳ trong một đơn vị thời gian, và có đơn vị thời gian nghịch đảo là t − 1 {displaystyle t^{-1}}
 , hoặc hertz.
, hoặc hertz. - Thời hằng τ = 1 / λ {displaystyle tau =1/lambda }
 là thời gian để biên độ suy giảm e lần.
là thời gian để biên độ suy giảm e lần. - Chu kỳ bán rã là thời gian cần để hình bao của dao động giảm biên độ còn một nửa. Giá trị này bằng với ln ( 2 ) / λ {displaystyle ln(2)/lambda } hay xấp xỉ bằng 0.693 / λ {displaystyle 0.693/lambda } .
- Hệ số tắt dần ζ {displaystyle zeta } là đại lượng không thứ nguyên đặc trưng cho quan hệ giữa tốc độ suy giảm và tần số, với giá trị xấp xỉ ζ = λ / ω {displaystyle zeta =lambda /omega } , hay chính xác là ζ = λ / λ 2 + ω 2 < 1 {displaystyle zeta =lambda /{sqrt {lambda ^{2}+omega ^{2}}}<1} .
- Hệ số Q: Q = 1 / ( 2 ζ ) {displaystyle Q=1/(2zeta )} là một đại lượng không thứ nguyên khác đặc trưng cho mức độ tắt dần; giá trị Q cao thể hiện sự tắt dần chậm so với dao động.
Hệ số tắt dần, thường được kí hiệu bởi ζ (chữ cái Hy Lạp zeta),[7] là một tham số đặc trưng cho đáp ứng tần số của một phương trình vi phân bậc hai. Hệ số này có vai trò quan trọng đặc thù trong lý thuyết điều khiển. Ngoài ra nó cũng đóng vai trò quan trọng trong dao động điều hòa. Một cách tổng quát, các hệ có hệ số tắt dần cao (lớn hơn hoặc bằng một) sẽ thể hiện sự tắt dần rõ rệt hơn. Các hệ tắt dần dưới ngưỡng có giá trị hệ số thấp hơn một. Riêng hệ tắt dần tới hạn có hệ số tắt dần chính xác bằng 1, hoặc rất gần giá trị đó.
Hệ số tắt dần mang lại một cách mô tả toán học về mức độ tắt dần của hệ so với dao động tắt dần tới hạn. Với một dao động điều hòa tắt dần có khối lượng m, hệ số cản giảm chấn c,và độ cứng lò xo k, nó có thể được định nghĩa là tỉ số giữa hệ số cản trong phương trình vi phân của hệ thống và hệ số cản tới hạn:
ζ = c c c = hệ số cản hệ số cản tới hạn , {displaystyle zeta ={frac {c}{c_{c}}}={frac {text{hệ số cản}}{text{hệ số cản tới hạn}}},}với phương trình chuyển động của hệ thống là
m d 2 x d t 2 + c d x d t + k x = 0 {displaystyle m{frac {d^{2}x}{dt^{2}}}+c{frac {dx}{dt}}+kx=0} . [8]và hệ số cản tới hạn tương ứng là
c c = 2 k m {displaystyle c_{c}=2{sqrt {km}}}hoặc
c c = 2 m k m = 2 m ω n {displaystyle c_{c}=2m{sqrt {frac {k}{m}}}=2momega _{n}}với
ω n = k m {displaystyle omega _{n}={sqrt {frac {k}{m}}}} là tần số dao động riêng của hệ thống.Hệ số tắt dần là tỉ số giữa hai đại lượng cùng thứ nguyên, vì vậy nó là một đại lượng không thứ nguyên.
Sử dụng tần số dao động riêng của một dao động điều hòa ω n = k / m {textstyle omega _{n}={sqrt {{k}/{m}}}} và định nghĩa của hệ số tắt dần ở trên, ta có thể viết lại phương trình vi phân bậc hai đã cho thành:
d 2 x d t 2 + 2 ζ ω n d x d t + ω n 2 x = 0. {displaystyle {frac {d^{2}x}{dt^{2}}}+2zeta omega _{n}{frac {dx}{dt}}+omega _{n}^{2}x=0.}Phương trình này tổng quát hơn so với hệ vật nặng - lò xo, và có thể áp dụng cho mạch điện và các lĩnh vực khác. Phương trình có thể giải được bằng cách sử dụng nghiệm
x ( t ) = C e s t , {displaystyle x(t)=Ce^{st},}với C và s là các hằng số phức, trong đó s thỏa mãn
s = − ω n ( ζ ± i 1 − ζ 2 ) . {displaystyle s=-omega _{n}left(zeta pm i{sqrt {1-zeta ^{2}}}right).}Hai nghiệm trên, với hai giá trị s thỏa mãn phương trình, có thể được kết hợp với nhau để cho ra nghiệm tổng quát, với đặc tính dao động và suy giảm chia thành các miền:
Hệ số Q, hệ số tắt dần ζ, và hệ số suy giảm hàm mũ α được liên hệ như sau[9]
ζ = 1 2 Q = α ω n . {displaystyle zeta ={frac {1}{2Q}}={alpha over omega _{n}}.}Khi một hệ bậc hai có ζ < 1 {displaystyle zeta <1} (tức là, khi hệ tắt dần dưới ngưỡng), nó có hai cực liên hợp phức với phần thực là − α {displaystyle -alpha } ; nói cách khác, α {displaystyle alpha } là hệ số suy giảm thể hiện tốc độ suy giảm hàm mũ của dao động. Hệ số tắt dần càng thấp thì tốc độ suy giảm càng chậm, và vì vậy hệ thống gần như không tắt dần sẽ dao động trong khoảng thời gian dài.[10] Ví dụ, một âm thoa chất lượng cao có hệ số tắt dần rất thấp sẽ tắt dần dao động rất chậm và duy trì dao động rất lâu sau khi bị gõ.
Đối với dao động tắt dần dưới ngưỡng, hệ số tắt dần còn liên quan tới suy giảm logarit δ {displaystyle delta } . Tỉ lệ tắt dần có thể được tìm ra cho hai đỉnh bất kì, kể cả khi chúng không liền kề nhau.[11] Với hai đỉnh liền kề:[12] [b]
ζ = δ δ 2 + ( 2 π ) 2 {displaystyle zeta ={frac {delta }{sqrt {delta ^{2}+left(2pi right)^{2}}}}} trong đó δ = ln x 0 x 1 {displaystyle delta =ln {frac {x_{0}}{x_{1}}}}với x0 và x1 là biên độ của hai đỉnh liền kề bất kì.
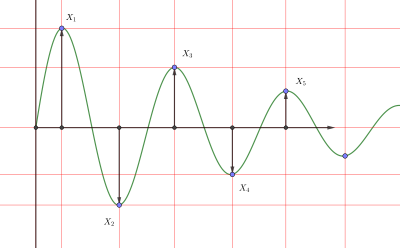
Theo hình bên phải, ta có:
δ = ln x 1 x 3 = ln x 2 x 4 = ln x 1 − x 2 x 3 − x 4 {displaystyle delta =ln {frac {x_{1}}{x_{3}}}=ln {frac {x_{2}}{x_{4}}}=ln {frac {x_{1}-x_{2}}{x_{3}-x_{4}}}}với x 1 {displaystyle x_{1}} , x 3 {displaystyle x_{3}} là biên độ của hai đỉnh dương liên tiếp and x 2 {displaystyle x_{2}} , x 4 {displaystyle x_{4}} là biên độ của hai đỉnh âm liên tiếp.
Trong lý thuyết điều khiển tự động, vọt lố là hiện tượng ngõ ra vượt quá giá trị xác lập.[13] Đối với đầu vào hàm nấc, phần trăm vọt lố (PO) bằng với giá trị tối đa[c] của đáp ứng trừ đi giá trị xác lập rồi chia cho giá trị xác lập. Với trường hợp hàm nấc đơn vị và sai số xác lập bằng không, giá trị vọt lố bằng với giá trị tối đa của đáp ứng nấc trừ đi một.
Phần trăm vọt lố (PO) có quan hệ với hệ số tắt dần (ζ) như sau
P O = 100 exp ( − ζ π 1 − ζ 2 ) {displaystyle mathrm {PO} =100exp left({-{frac {zeta pi }{sqrt {1-zeta ^{2}}}}}right)}Ngược lại, hệ số tắt dần (ζ) ứng với phần trăm vọt lố cho trước được tính như sau:
ζ = − ln ( P O 100 ) π 2 + ln 2 ( P O 100 ) {displaystyle zeta ={frac {-ln left({frac {rm {PO}}{100}}right)}{sqrt {pi ^{2}+ln ^{2}left({frac {rm {PO}}{100}}right)}}}}Khi một vật rơi tự do trong không khí, lực duy nhất chống lại sự rơi tự do của nó là lực cản không khí. Một vật rơi trong nước hay dầu sẽ bị làm chậm lại đi hơn nhiều, cho tới khi đạt được vận tốc xác lập khi lực cản cân bằng với trọng lực. Đây là khái niệm của lực cản nhớt, một loại lực có ứng dụng chẳng hạn như trong cửa tự động hoặc cửa chống sập.[14]
Hệ thống điện hoạt động với dòng điện xoay chiều (AC) sử dụng điện trở để tắt dần mạch dao động LC. [14]
Động năng gây ra dao động được tiêu tán nhờ vào dòng điện xoáy cảm ứng được sinh nhờ vào việc đưa một cuộn dây hoặc đĩa nhôm đi qua cực của một nam châm. Dòng điện xoáy là thành phần chủ chốt xuất hiện trong hiện tựợng cảm ứng điện từ khi chúng sinh ra từ thông chống lại sự dao động, tạo ra một lực phản kháng. [15] Nói cách khác, sự phản kháng được gây ra bởi lực từ làm cho hệ thống chuyển động chậm lại. Một ví dụ về ứng dụng của khái niệm này là thắng từ trên tàu lượn siêu tốc. [16]
Giảm chấn bằng chất lỏng lưu biến từ (Giảm chấn MR) sử dụng chất lỏng lưu biến từ, một loại chất lỏng thay đổi độ nhớt dưới tác dụng của từ trường. Trong trường hợp này, giảm chấn bằng chất lỏng lưu biến từ có thể được coi là một phương pháp giảm chấn liên ngành sử dụng cả cơ chế giảm chấn nhớt và từ. [17] [18]
- "Damping". Encyclopædia Britannica.
- OpenStax, College. "Physics". Lumen.
Link nội dung: https://stt.edu.vn/dao-dong-tat-dan-la-mot-dao-dong-co-a75659.html